Blender 使用骨骼绑定制作机械动画练习(2)
Blender
依旧使用了 shift + i 添加了反向运动学约束。
发布于 2026-06-15 , 附件占用 :584.24 KB
摘要 : 使用骨骼绑定制作机器人的脚,并为controller设置驱动器(正弦余弦)来制作循环往复的抬腿动作。依旧使用了 shift + i 添加了反向运动学约束。
❱ 相关站内搜索:
Blender 使用骨骼绑定制作机械动画练习
Blender 骨骼绑定的基本操作方法
❱ 前期准备
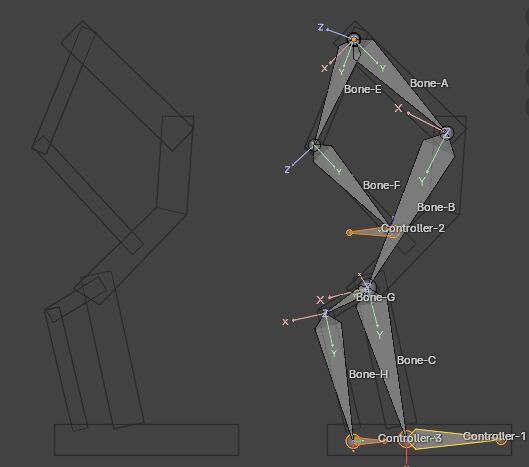
1. 如图,建立机器腿部结构,并建立对应的骨骼(Bone-A、B、C。。。)和3个手柄骨骼(Controller-1、2、3)。
在关节分叉处,选中关节球,E,即可在关节位置挤出新骨骼。
2. 编辑模式下,3个手柄 Controller 要使用 alt + P,清空父级 。
❱ 关键设置
1. 姿态模式下先选中Controller-1 再选中 Bone-C ,shift + i,添加 IK。
依次对 Controller-2 和 Bone-F 、Controller-3 和 Bone-H 进行同样操作。
三个手柄分别控制着不同部分移动。
2. Controller-3 原本是只控制脚踝部分,但现在会影响整条大腿(姿态模式下,观察黄色线的连接终点)
所以我们要姿态模式下,选中 Bone-H,在右侧 IK 约束中,把链长改为 2 ,表示影响2根骨骼(原本是 0 ,表示到底)。
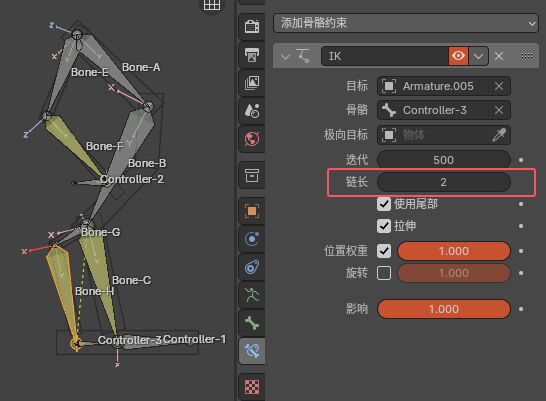
此时再移动 Controll-3,可以看到大腿并不会受影响。
3. 在编辑模式下,使用 ctrl + P(保持偏移量)将Controller-2 绑定为 Bone-B的子级,将Controller-3 绑定为 Controller-1的子级。
移动/选装 Controller-1:
4. 把网格物体绑定到对应的骨骼上。
❱ 让脚步自动动起来
❱ 办法1:关键帧结合 shift + E
可以使用关键帧结合 shift + E,让动画不断重复循环。
❱ 办法2:为Controller-1 添加驱动器
姿态模式下,选中 Controller-1,分别为 X Y 轴坐标添加:
注意,这个坐标XY轴不是世界坐标系,而是单根骨头的。
X: #sin(frame*0.08)*0.04-0.03
// 0.08 :影响速度。 0.04:影响范围。 -0.03:初始X位置在-0.03(米)。
Y: #cos(frame*0.08)*0.08
// 第一个 0.08 :影响速度。 第二个 0.08:影响范围。 因为初始位置是0 ,所以无需再修正Y轴坐标。
// 0.08 :影响速度。 0.04:影响范围。 -0.03:初始X位置在-0.03(米)。
Y: #cos(frame*0.08)*0.08
// 第一个 0.08 :影响速度。 第二个 0.08:影响范围。 因为初始位置是0 ,所以无需再修正Y轴坐标。
再在 旋转Z上添加:
旋转Z:#cos(frame*0.08)*0.3
//0.08:影响速度,要跟上面一致。 0.3 影响旋转最大角度。
//0.08:影响速度,要跟上面一致。 0.3 影响旋转最大角度。
实现抬脚循环效果